

Students News
-

Plasma Jets Stabilize Water to Splash Less
< High-speed shadowgraph movie of water surface deformations induced by plasma impingement. > A study by KAIST researchers revealed that an ionized gas jet blowing onto water, also known as a ‘plasma jet’, produces a more stable interaction with the water’s surface compared to a neutral gas jet. This finding reported in the April 1 issue of Nature will help improve the scientific understanding of plasma-liquid interactions and their practical applications in a wide range of industrial fields in which fluid control technology is used, including biomedical engineering, chemical production, and agriculture and food engineering. Gas jets can create dimple-like depressions in liquid surfaces, and this phenomenon is familiar to anyone who has seen the cavity produced by blowing air through a straw directly above a cup of juice. As the speed of the gas jet increases, the cavity becomes unstable and starts bubbling and splashing. “Understanding the physical properties of interactions between gases and liquids is crucial for many natural and industrial processes, such as the wind blowing over the surface of the ocean, or steelmaking methods that involve blowing oxygen over the top of molten iron,” explained Professor Wonho Choe, a physicist from KAIST and the corresponding author of the study. However, despite its scientific and practical importance, little is known about how gas-blown liquid cavities become deformed and destabilized. In this study, a group of KAIST physicists led by Professor Choe and the team’s collaborators from Chonbuk National University in Korea and the Jožef Stefan Institute in Slovenia investigated what happens when an ionized gas jet, also known as a ‘plasma jet’, is blown over water. A plasma jet is created by applying high voltage to a nozzle as gas flows through it, which causes the gas to be weakly ionized and acquire freely-moving charged particles. The research team used an optical technique combined with high-speed imaging to observe the profiles of the water surface cavities created by both neutral helium gas jets and weakly ionized helium gas jets. They also developed a computational model to mathematically explain the mechanisms behind their experimental discovery. The researchers demonstrated for the first time that an ionized gas jet has a stabilizing effect on the water’s surface. They found that certain forces exerted by the plasma jet make the water surface cavity more stable, meaning there is less bubbling and splashing compared to the cavity created by a neutral gas jet. Specifically, the study showed that the plasma jet consists of pulsed waves of gas ionization propagating along the water’s surface so-called ‘plasma bullets’ that exert more force than a neutral gas jet, making the cavity deeper without becoming destabilized. “This is the first time that this phenomenon has been reported, and our group considers this as a critical step forward in our understanding of how plasma jets interact with liquid surfaces. We next plan to expand this finding through more case studies that involve diverse plasma and liquid characteristics,” said Professor Choe. This work was supported by KAIST as part of the High-Risk and High-Return Project, the National Research Foundation of Korea (NRF), and the Slovenian Research Agency (ARRS). < Cavity formation at the water’s surface subjected to a neutral helium gas jet (left) and a weakly ionized helium gas jet (right). > Image Credit: Professor Wonho Choe, KAIST Usage Restrictions: News organizations may use or redistribute these materials, with proper attribution, as part of news coverage of this paper only. Publication: Park, S., et al. (2021) Stabilization of liquid instabilities with ionized gas jets. Nature, Vol. No. 592, Issue No. 7852, pp. 49-53. Available online at https://doi.org/10.1038/s41586-021-03359-9 Profile: Wonho Choe, Ph.D. Professor wchoe@kaist.ac.kr https://gdpl.kaist.ac.kr/ Gas Discharge Physics Laboratory (GDPL) Department of Nuclear and Quantum Engineering Department of Physics Impurity and Edge Plasma Research Center (IERC) http://kaist.ac.kr/en/ Korea Advanced Institute of Science and Technology (KAIST) Daejeon, Republic of Korea (END)
-
Centrifugal Multispun Nanofibers Put a New Spin on..
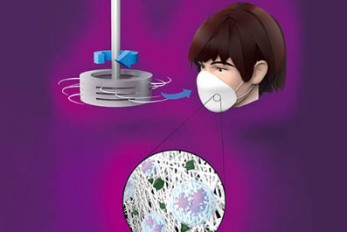
KAIST researchers have developed a novel nanofiber production technique called ‘centrifugal multispinning’ that will open the door for the safe and cost-effective mass production of high-performance polymer nanofibers. This new technique, which has shown up to a 300 times higher nanofiber production rate per hour than that of the conventional electrospinning method, has many potential applications including the development of face mask filters for coronavirus protection. Nanofibers make good face mask filters because their mechanical interactions with aerosol particles give them a greater ability to capture more than 90% of harmful particles such as fine dust and virus-containing droplets. The impact of the COVID-19 pandemic has further accelerated the growing demand in recent years for a better kind of face mask. A polymer nanofiber-based mask filter that can more effectively block harmful particles has also been in higher demand as the pandemic continues. ‘Electrospinning’ has been a common process used to prepare fine and uniform polymer nanofibers, but in terms of safety, cost-effectiveness, and mass production, it has several drawbacks. The electrospinning method requires a high-voltage electric field and electrically conductive target, and this hinders the safe and cost-effective mass production of polymer nanofibers. In response to this shortcoming, ‘centrifugal spinning’ that utilizes centrifugal force instead of high voltage to produce polymer nanofibers has been suggested as a safer and more cost-effective alternative to the electrospinning. Easy scalability is another advantage, as this technology only requires a rotating spinneret and a collector. However, since the existing centrifugal force-based spinning technology employs only a single rotating spinneret, productivity is limited and not much higher than that of some advanced electrospinning technologies such as ‘multi-nozzle electrospinning’ and ‘nozzleless electrospinning.’ This problem persists even when the size of the spinneret is increased. Inspired by these limitations, a research team led by Professor Do Hyun Kim from the Department of Chemical and Biomolecular Engineering at KAIST developed a centrifugal multispinning spinneret with mass-producibility, by sectioning a rotating spinneret into three sub-disks. This study was published as a front cover article of ACS Macro Letters, Volume 10, Issue 3 in March 2021. Using this new centrifugal multispinning spinneret with three sub-disks, the lead author of the paper PhD candidate Byeong Eun Kwak and his fellow researchers Hyo Jeong Yoo and Eungjun Lee demonstrated the gram-scale production of various polymer nanofibers with a maximum production rate of up to 25 grams per hour, which is approximately 300 times higher than that of the conventional electrospinning system. The production rate of up to 25 grams of polymer nanofibers per hour corresponds to the production rate of about 30 face mask filters per day in a lab-scale manufacturing system. By integrating the mass-produced polymer nanofibers into the form of a mask filter, the researchers were able to fabricate face masks that have comparable filtration performance with the KF80 and KF94 face masks that are currently available in the Korean market. The KF80 and KF94 masks have been approved by the Ministry of Food and Drug Safety of Korea to filter out at least 80% and 94% of harmful particles respectively. “When our system is scaled up from the lab scale to an industrial scale, the large-scale production of centrifugal multispun polymer nanofibers will be made possible, and the cost of polymer nanofiber-based face mask filters will also be lowered dramatically,” Kwak explained. This work was supported by the KAIST-funded Global Singularity Research Program for 2020. < Figure. (A) Schematic illustration of the centrifugal multispinning polymer nanofiber production process. (B) The polymer nanofibers spun by the system. The increase of the number of sub-disk shows the proportional enhancement of the productivity. (C) Face masks and mask filters fabricated using mass-produced nanofibers (inset). > < Image. Journal Cover > Publication: Byeong Eun Kwak, Hyo Jeong Yoo, Eungjun Lee, and Do Hyun Kim. (2021) Large-Scale Centrifugal Multispinning Production of Polymer Micro- and Nanofibers for Mask Filter Application with a Potential of Cospinning Mixed Multicomponent Fibers. ACS Macro Letters, Volume No. 10, Issue No. 3, pp. 382-388. Available online at https://doi.org/10.1021/acsmacrolett.0c00829 Profile: Do Hyun Kim, Sc.D. Professor dohyun.kim@kaist.edu http://procal.kaist.ac.kr/ Process Analysis Laboratory Department of Chemical and Biomolecular Engineering https:/kaist.ac.kr/en/ Korea Advanced Institute of Science and Technology (KAIST) Daejeon 34141, Korea (END)
-
Acoustic Graphene Plasmons Study Paves Way for Opt..
- The first images of mid-infrared optical waves compressed 1,000 times captured using a highly sensitive scattering-type scanning near-field optical microscope. - < Post-doc Researcher Sergey G. Menabde (Left) and Professor Min Seok Jang (Right) > KAIST researchers and their collaborators at home and abroad have successfully demonstrated a new methodology for direct near-field optical imaging of acoustic graphene plasmon fields. This strategy will provide a breakthrough for the practical applications of acoustic graphene plasmon platforms in next-generation, high-performance, graphene-based optoelectronic devices with enhanced light-matter interactions and lower propagation loss. It was recently demonstrated that ‘graphene plasmons’ – collective oscillations of free electrons in graphene coupled to electromagnetic waves of light – can be used to trap and compress optical waves inside a very thin dielectric layer separating graphene from a metallic sheet. In such a configuration, graphene’s conduction electrons are “reflected” in the metal, so when the light waves “push” the electrons in graphene, their image charges in metal also start to oscillate. This new type of collective electronic oscillation mode is called ‘acoustic graphene plasmon (AGP)’. The existence of AGP could previously be observed only via indirect methods such as far-field infrared spectroscopy and photocurrent mapping. This indirect observation was the price that researchers had to pay for the strong compression of optical waves inside nanometer-thin structures. It was believed that the intensity of electromagnetic fields outside the device was insufficient for direct near-field optical imaging of AGP. Challenged by these limitations, three research groups combined their efforts to bring together a unique experimental technique using advanced nanofabrication methods. Their findings were published in Nature Communications on February 19. A KAIST research team led by Professor Min Seok Jang from the School of Electrical Engineering used a highly sensitive scattering-type scanning near-field optical microscope (s-SNOM) to directly measure the optical fields of the AGP waves propagating in a nanometer-thin waveguide, visualizing thousand-fold compression of mid-infrared light for the first time. Professor Jang and a post-doc researcher in his group, Sergey G. Menabde, successfully obtained direct images of AGP waves by taking advantage of their rapidly decaying yet always present electric field above graphene. They showed that AGPs are detectable even when most of their energy is flowing inside the dielectric below the graphene. This became possible due to the ultra-smooth surfaces inside the nano-waveguides where plasmonic waves can propagate at longer distances. The AGP mode probed by the researchers was up to 2.3 times more confined and exhibited a 1.4 times higher figure of merit in terms of the normalized propagation length compared to the graphene surface plasmon under similar conditions. These ultra-smooth nanostructures of the waveguides used in the experiment were created using a template-stripping method by Professor Sang-Hyun Oh and a post-doc researcher, In-Ho Lee, from the Department of Electrical and Computer Engineering at the University of Minnesota. Professor Young Hee Lee and his researchers at the Center for Integrated Nanostructure Physics (CINAP) of the Institute of Basic Science (IBS) at Sungkyunkwan University synthesized the graphene with a monocrystalline structure, and this high-quality, large-area graphene enabled low-loss plasmonic propagation. The chemical and physical properties of many important organic molecules can be detected and evaluated by their absorption signatures in the mid-infrared spectrum. However, conventional detection methods require a large number of molecules for successful detection, whereas the ultra-compressed AGP fields can provide strong light-matter interactions at the microscopic level, thus significantly improving the detection sensitivity down to a single molecule. Furthermore, the study conducted by Professor Jang and the team demonstrated that the mid-infrared AGPs are inherently less sensitive to losses in graphene due to their fields being mostly confined within the dielectric. The research team’s reported results suggest that AGPs could become a promising platform for electrically tunable graphene-based optoelectronic devices that typically suffer from higher absorption rates in graphene such as metasurfaces, optical switches, photovoltaics, and other optoelectronic applications operating at infrared frequencies. Professor Jang said, “Our research revealed that the ultra-compressed electromagnetic fields of acoustic graphene plasmons can be directly accessed through near-field optical microscopy methods. I hope this realization will motivate other researchers to apply AGPs to various problems where strong light-matter interactions and lower propagation loss are needed.” This research was primarily funded by the Samsung Research Funding & Incubation Center of Samsung Electronics. The National Research Foundation of Korea (NRF), the U.S. National Science Foundation (NSF), Samsung Global Research Outreach (GRO) Program, and Institute for Basic Science of Korea (IBS) also supported the work. < Figure. Laser-illuminated nano-tip excites the acoustic graphene plasmon in the layer between the graphene and the gold/alumina. > Publication: Menabde, S. G., et al. (2021) Real-space imaging of acoustic plasmons in large-area graphene grown by chemical vapor deposition. Nature Communications 12, Article No. 938. Available online at https://doi.org/10.1038/s41467-021-21193-5 Profile: Min Seok Jang, MS, PhD Associate Professor jang.minseok@kaist.ac.kr http://jlab.kaist.ac.kr/ Min Seok Jang Research Group School of Electrical Engineering http://kaist.ac.kr/en/ Korea Advanced Institute of Science and Technology (KAIST) Daejeon, Republic of Korea (END)
-
A Biological Strategy Reveals How Efficient Brain ..
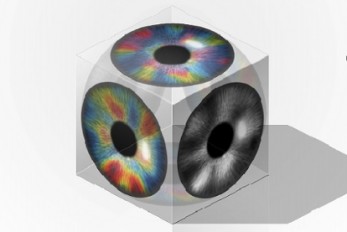
- A KAIST team’s mathematical modelling shows that the topographic tiling of cortical maps originates from bottom-up projections from the periphery. - Researchers have explained how the regularly structured topographic maps in the visual cortex of the brain could arise spontaneously to efficiently process visual information. This research provides a new framework for understanding functional architectures in the visual cortex during early developmental stages. A KAIST research team led by Professor Se-Bum Paik from the Department of Bio and Brain Engineering has demonstrated that the orthogonal organization of retinal mosaics in the periphery is mirrored onto the primary visual cortex and initiates the clustered topography of higher visual areas in the brain. This new finding provides advanced insights into the mechanisms underlying a biological strategy of brain circuitry for the efficient tiling of sensory modules. The study was published in Cell Reports on January 5. In higher mammals, the primary visual cortex is organized into various functional maps for neural tuning such as ocular dominance, orientation selectivity, and spatial frequency selectivity. Correlations between the topographies of different maps have been observed, implying their systematic organizations for the efficient tiling of sensory modules across cortical areas. These observations have suggested that a common principle for developing individual functional maps may exist. However, it has remained unclear how such topographical organizations could arise spontaneously in the primary visual cortex of various species. The research team found that the orthogonal organization in the primary visual cortex of the brain originates from the spatial organization in bottom-up feedforward projections. The team showed that an orthogonal relationship among sensory modules already exists in the retinal mosaics, and that this is mirrored onto the primary visual cortex to initiate the clustered topography. By analyzing the retinal ganglion cell mosaics data in cats and monkeys, the researchers found that the structure of ON-OFF feedforward afferents is organized into a topographic tiling, analogous to the orthogonal intersection of cortical tuning maps. Furthermore, the team’s analysis of previously published data collected on cats also showed that the ocular dominance, orientation selectivity, and spatial frequency selectivity in the primary visual cortex are correlated with the spatial profiles of the retinal inputs, implying that efficient tiling of cortical domains can originate from the regularly structured retinal patterns. Professor Paik said, “Our study suggests that the structure of the periphery with simple feedforward wiring can provide the basis for a mechanism by which the early visual circuitry is assembled.” He continued, “This is the first report that spatially organized retinal inputs from the periphery provide a common blueprint for multi-modal sensory modules in the visual cortex during the early developmental stages. Our findings would make a significant impact on our understanding the developmental strategy of brain circuitry for efficient sensory information processing.” This work was supported by the National Research Foundation of Korea (NRF). < Figure 1. The image depicts the retinal origin of functional maps of neural tuning in visual cortex. > < Figure 2. The image depicts the orthogonal intersection of cortical tuning maps that are initiated by the topographic tiling of retinal ganglion cell mosaics. > < Figure 3. The regularly structured retinal circuits provide a blueprint of the clustered topography of multiple tuning maps in the primary visual cortex. > Image credit: Professor Se-Bum Paik, KAIST Image usage restrictions: News organizations may use or redistribute this image, with proper attribution, as part of news coverage of this paper only. Publication: Song, M, et al. (2021) Projection of orthogonal tiling from the retina to the visual cortex. Cell Reports 34, 108581. Available online at https://doi.org/10.1016/j.celrep.2020.108581 Profile: Se-Bum Paik, Ph.D Assistant Professor sbpaik@kaist.ac.kr http://vs.kaist.ac.kr/ VSNN Laboratory Department of Bio and Brain Engineering Program of Brain and Cognitive Engineering http://kaist.ac.kr Korea Advanced Institute of Science and Technology (KAIST) Daejeon, Republic of Korea Profile: Min Song Ph.D. Candidate night@kaist.ac.kr Program of Brain and Cognitive Engineering Profile: Jaeson Jang, Ph.D. Researcher jaesonjang@kaist.ac.kr Department of Bio and Brain Engineering, KAIST (END)
-

DeepTFactor Predicts Transcription Factors
A deep learning-based tool predicts transcription factors using protein sequences as inputs A joint research team from KAIST and UCSD has developed a deep neural network named DeepTFactor that predicts transcription factors from protein sequences. DeepTFactor will serve as a useful tool for understanding the regulatory systems of organisms, accelerating the use of deep learning for solving biological problems. A transcription factor is a protein that specifically binds to DNA sequences to control the transcription initiation. Analyzing transcriptional regulation enables the understanding of how organisms control gene expression in response to genetic or environmental changes. In this regard, finding the transcription factor of an organism is the first step in the analysis of the transcriptional regulatory system of an organism. Previously, transcription factors have been predicted by analyzing sequence homology with already characterized transcription factors or by data-driven approaches such as machine learning. Conventional machine learning models require a rigorous feature selection process that relies on domain expertise such as calculating the physicochemical properties of molecules or analyzing the homology of biological sequences. Meanwhile, deep learning can inherently learn latent features for the specific task. A joint research team comprised of Ph.D. candidate Gi Bae Kim and Distinguished Professor Sang Yup Lee of the Department of Chemical and Biomolecular Engineering at KAIST, and Ye Gao and Professor Bernhard O. Palsson of the Department of Biochemical Engineering at UCSD reported a deep learning-based tool for the prediction of transcription factors. Their research paper “DeepTFactor: A deep learning-based tool for the prediction of transcription factors” was published online in PNAS. Their article reports the development of DeepTFactor, a deep learning-based tool that predicts whether a given protein sequence is a transcription factor using three parallel convolutional neural networks. The joint research team predicted 332 transcription factors of Escherichia coli K-12 MG1655 using DeepTFactor and the performance of DeepTFactor by experimentally confirming the genome-wide binding sites of three predicted transcription factors (YqhC, YiaU, and YahB). The joint research team further used a saliency method to understand the reasoning process of DeepTFactor. The researchers confirmed that even though information on the DNA binding domains of the transcription factor was not explicitly given the training process, DeepTFactor implicitly learned and used them for prediction. Unlike previous transcription factor prediction tools that were developed only for protein sequences of specific organisms, DeepTFactor is expected to be used in the analysis of the transcription systems of all organisms at a high level of performance. Distinguished Professor Sang Yup Lee said, “DeepTFactor can be used to discover unknown transcription factors from numerous protein sequences that have not yet been characterized. It is expected that DeepTFactor will serve as an important tool for analyzing the regulatory systems of organisms of interest.” This work was supported by the Technology Development Program to Solve Climate Changes on Systems Metabolic Engineering for Biorefineries from the Ministry of Science and ICT through the National Research Foundation of Korea. < Figure: The network architecture of DeepTFactor. An input protein sequence is processed using three parallel subnetworks. > -Publication Gi Bae Kim, Ye Gao, Bernhard O. Palsson, and Sang Yup Lee. DeepTFactor: A deep learning-based tool for the prediction of transcription factors. (https://doi.org/10.1073/pnas202117118) -Profile Distinguished Professor Sang Yup Lee leesy@kaist.ac.kr Metabolic &Biomolecular Engineering National Research Laboratory http://mbel.kaist.ac.kr Department of Chemical and Biomolecular Engineering KAIST
-

Extremely Stable Perovskite Nanoparticles Films fo..
< Figure 1:Photographs of large-area siloxane-encapsulated perovskite nanoparticle films. The left one indicates the perfect color converting property on commercial mobile phone screens. The right one presents color converted films under versatile bending states. > Researchers have reported an extremely stable cross-linked perovskite nanoparticle that maintains a high photoluminescence quantum yield (PLQY) for 1.5 years in air and harsh liquid environments. This stable material’s design strategies, which addressed one of the most critical problems limiting their practical application, provide a breakthrough for the commercialization of perovskite nanoparticles in next-generation displays and bio-related applications. According to the research team led by Professor Byeong-Soo Bae, their development can survive in severe environments such as water, various polar solvents, and high temperature with high humidity without additional encapsulation. This development is expected to enable perovskite nanoparticles to be applied to high color purity display applications as a practical color converting material. This result was published as the inside front cover article in Advanced Materials. Perovskites, which consist of organics, metals, and halogen elements, have emerged as key elements in various optoelectronic applications. The power conversion efficiency of photovoltaic cells based on perovskites light absorbers has been rapidly increased. Perovskites are also great promise as a light emitter in display applications because of their low material cost, facile wavelength tunability, high (PLQY), very narrow emission band width, and wider color gamut than inorganic semiconducting nanocrystals and organic emitters. Thanks to these advantages, perovskites have been identified as a key color-converting material for next-generation high color-purity displays. In particular, perovskites are the only luminescence material that meets Rec. 2020 which is a new color standard in display industry. However, perovskites are very unstable against heat, moisture, and light, which makes them almost impossible to use in practical applications. To solve these problems, many researchers have attempted to physically prevent perovskites from coming into contact with water molecules by passivating the perovskite grain and nanoparticle surfaces with organic ligands or inorganic shell materials, or by fabricating perovskite-polymer nanocomposites. These methods require complex processes and have limited stability in ambient air and water. Furthermore, stable perovskite nanoparticles in the various chemical environments and high temperatures with high humidity have not been reported yet. The research team in collaboration with Seoul National University develops siloxane-encapsulated perovskite nanoparticle composite films. Here, perovskite nanoparticles are chemically crosslinked with thermally stable siloxane molecules, thereby significantly improving the stability of the perovskite nanoparticles without the need for any additional protecting layer. Siloxane-encapsulated perovskite nanoparticle composite films exhibited a high PLQY (> 70%) value, which can be maintained over 600 days in water, various chemicals (alcohol, strong acidic and basic solutions), and high temperatures with high humidity (85℃/85%). The research team investigated the mechanisms impacting the chemical crosslinking and water molecule-induced stabilization of perovskite nanoparticles through various photo-physical analysis and density-functional theory calculation. The research team confirmed that displays based on their siloxane-perovskite nanoparticle composite films exhibited higher PLQY and a wider color gamut than those of Cd-based quantum dots and demonstrated perfect color converting properties on commercial mobile phone screens. Unlike what was commonly believed in the halide perovskite field, the composite films showed excellent bio-compatibility because the siloxane matrix prevents the toxicity of Pb in perovskite nanoparticle. By using this technology, the instability of perovskite materials, which is the biggest challenge for practical applications, is greatly improved through simple encapsulation method. “Perovskite nanoparticle is the only photoluminescent material that can meet the next generation display color standard. Nevertheless, there has been reluctant to commercialize it due to its moisture vulnerability. The newly developed siloxane encapsulation technology will trigger more research on perovskite nanoparticles as color conversion materials and will accelerate early commercialization,” Professor Bae said. This work was supported by the Wearable Platform Materials Technology Center (WMC) of the Engineering Research Center (ERC) Project, and the Leadership Research Program funded by the National Research Foundation of Korea. < Figure 2. Schematic illustration of the water-induced stabilization of siloxane-encapsulated perovskite nanoparticles. > -Publication: Junho Jang, Young-Hoon Kim, Sunjoon Park, Dongsuk Yoo, Hyunjin Cho, Jinhyeong Jang, Han Beom Jeong, Hyunhwan Lee, Jong Min Yuk, Chan Beum Park, Duk Young Jeon, Yong-Hyun Kim, Byeong-Soo Bae, and Tae-Woo Lee. “Extremely Stable Luminescent Crosslinked Perovskite Nanoparticles under Harsh Environments over 1.5 Years” Advanced Materials, 2020, 2005255. https://doi.org/10.1002/adma.202005255. Link to download the full-text paper: https://onlinelibrary.wiley.com/doi/10.1002/adma.202005255 -Profile: Prof. Byeong-Soo Bae (Corresponding author) bsbae@kaist.ac.kr Lab. of Optical Materials & Coating Department of Materials Science and Engineering Korea Advanced Institute of Science and Technology (KAIST)
-
A Comprehensive Review of Biosynthesis of Inorgani..
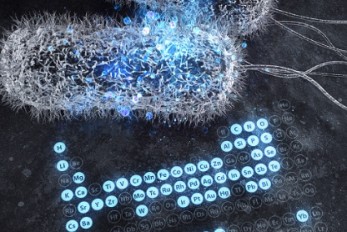
< Distinguished Professor Lee and Dr. Yoojin Choi > There are diverse methods for producing numerous inorganic nanomaterials involving many experimental variables. Among the numerous possible matches, finding the best pair for synthesizing in an environmentally friendly way has been a longstanding challenge for researchers and industries. A KAIST bioprocess engineering research team led by Distinguished Professor Sang Yup Lee conducted a summary of 146 biosynthesized single and multi-element inorganic nanomaterials covering 55 elements in the periodic table synthesized using wild-type and genetically engineered microorganisms. Their research highlights the diverse applications of biogenic nanomaterials and gives strategies for improving the biosynthesis of nanomaterials in terms of their producibility, crystallinity, size, and shape. The research team described a 10-step flow chart for developing the biosynthesis of inorganic nanomaterials using microorganisms and bacteriophages. The research was published at Nature Review Chemistry as a cover and hero paper on December 3. “We suggest general strategies for microbial nanomaterial biosynthesis via a step-by-step flow chart and give our perspectives on the future of nanomaterial biosynthesis and applications. This flow chart will serve as a general guide for those wishing to prepare biosynthetic inorganic nanomaterials using microbial cells,” explained Dr.Yoojin Choi, a co-author of this research. Most inorganic nanomaterials are produced using physical and chemical methods and biological synthesis has been gaining more and more attention. However, conventional synthesis processes have drawbacks in terms of high energy consumption and non-environmentally friendly processes. Meanwhile, microorganisms such as microalgae, yeasts, fungi, bacteria, and even viruses can be utilized as biofactories to produce single and multi-element inorganic nanomaterials under mild conditions. After conducting a massive survey, the research team summed up that the development of genetically engineered microorganisms with increased inorganic-ion-binding affinity, inorganic-ion-reduction ability, and nanomaterial biosynthetic efficiency has enabled the synthesis of many inorganic nanomaterials. Among the strategies, the team introduced their analysis of a Pourbaix diagram for controlling the size and morphology of a product. The research team said this Pourbaix diagram analysis can be widely employed for biosynthesizing new nanomaterials with industrial applications.Professor Sang Yup Lee added, “This research provides extensive information and perspectives on the biosynthesis of diverse inorganic nanomaterials using microorganisms and bacteriophages and their applications. We expect that biosynthetic inorganic nanomaterials will find more diverse and innovative applications across diverse fields of science and technology.” Dr. Choi started this research in 2018 and her interview about completing this extensive research was featured in an article at Nature Career article on December 4. < Single- and two-element map of inorganic nanomaterials biosynthesized using microbial cells and bacteriophages. Fifty-one elements (excluding H, C, N and O) have been used in inorganic nanomaterial synthesis using microbial cells and bacteriophages. White spaces indicate that biosynthesis of inorganic nanomaterials comprising the corresponding elements has not yet been reported. Red denotes unary or binary metal/non-metal nanomaterials that have been biosynthesized. Dark blue denotes metal/non-metal oxides that have been biosynthesized. Light blue indicates biosynthesized metal hydroxides. Light purple indicates that metal/non-metal phosphates have been biosynthesized. Orange indicates that metal carbonates have been biosynthesized. All inorganic nanomaterials biosynthesized using microbial cells and bacteriophages are listed in the paper. > -Profile Distinguished Professor Sang Yup Lee leesy@kaist.ac.kr Metabolic &Biomolecular Engineering National Research Laboratory http://mbel.kaist.ac.kr Department of Chemical and Biomolecular Engineering KAIST
-

Simulations Open a New Way to Reverse Cell Aging
Turning off a newly identified enzyme could reverse a natural aging process in cells. Research findings by a KAIST team provide insight into the complex mechanism of cellular senescence and present a potential therapeutic strategy for reducing age-related diseases associated with the accumulation of senescent cells. Simulations that model molecular interactions have identified an enzyme that could be targeted to reverse a natural aging process called cellular senescence. The findings were validated with laboratory experiments on skin cells and skin equivalent tissues, and published in the Proceedings of the National Academy of Sciences (PNAS). “Our research opens the door for a new generation that perceives aging as a reversible biological phenomenon,” says Professor Kwang-Hyun Cho of the Department of Bio and Brain engineering at the Korea Advanced Institute of Science and Technology (KAIST), who led the research with colleagues from KAIST and Amorepacific Corporation in Korea. Cells respond to a variety of factors, such as oxidative stress, DNA damage, and shortening of the telomeres capping the ends of chromosomes, by entering a stable and persistent exit from the cell cycle. This process, called cellular senescence, is important, as it prevents damaged cells from proliferating and turning into cancer cells. But it is also a natural process that contributes to aging and age-related diseases. Recent research has shown that cellular senescence can be reversed. But the laboratory approaches used thus far also impair tissue regeneration or have the potential to trigger malignant transformations. Professor Cho and his colleagues used an innovative strategy to identify molecules that could be targeted for reversing cellular senescence. The team pooled together information from the literature and databases about the molecular processes involved in cellular senescence. To this, they added results from their own research on the molecular processes involved in the proliferation, quiescence (a non-dividing cell that can re-enter the cell cycle) and senescence of skin fibroblasts, a cell type well known for repairing wounds. Using algorithms, they developed a model that simulates the interactions between these molecules. Their analyses allowed them to predict which molecules could be targeted to reverse cell senescence. They then investigated one of the molecules, an enzyme called PDK1, in incubated senescent skin fibroblasts and three-dimensional skin equivalent tissue models. They found that blocking PDK1 led to the inhibition of two downstream signalling molecules, which in turn restored the cells’ ability to enter back into the cell cycle. Notably, the cells retained their capacity to regenerate wounded skin without proliferating in a way that could lead to malignant transformation. The scientists recommend investigations are next done in organs and organisms to determine the full effect of PDK1 inhibition. Since the gene that codes for PDK1 is overexpressed in some cancers, the scientists expect that inhibiting it will have both anti-aging and anti-cancer effects. < Figure: The scientists conducted what is known as an ensemble model simulation to identify molecules that could be targeted to reverse cell senescence. They then used the model to predict the effects of inhibiting PDK1 in senescent cells, and confirmed the results in lab-cultured cells and skin equivalent tissue models. > -Profile Professor Kwang-Hyun Cho Laboratory for Systems Biology and Bio-Inspired Engineering http://sbie.kaist.ac.kr Department of Bio and Brain Engineering KAIST
-

Team USRG’s Winning Streak Continues at the AI Gra..
< Team USRG won the AI Grand Challenge 2020 for the second consecutive year. > Team USRG (Unmanned Systems Research Group) led by Professor Hyunchul Shim from the School of Electrical Engineering has won the AI Grand Challenge 2020 held on Nov. 23 at Kintex in Ilsan, Kyonggi-do for the second consecutive year. The team received 7.7 million KRW in research funding from the Ministry of Science and ICT, the organizer of the challenge. The team took a little over two minutes to complete the rescue operation mission of the challenge. The mission included swerving around seven obstacles, airdropping an aid package, and safely landing after identifying the landing spot. Their drone is the only one that successfully passed through a 10-meter tunnel out of five pre-qualified teams: three from universities and two from companies. The AI Grand Challenge, which began in 2017, was designed to promote AI technology and its applications for addressing high-risk technical challenges, especially for conducting complex disaster relief operations. For autonomous flying drones, swerving to avoid objects has always been an essential skill and a big challenge. For their flawless performance in the rescue operation, the team loaded an AI algorithm and upgraded their drone by improving the LiDAR-based localization system and a stronger propulsion system to carry more sensors. The drone weighs 2.4 kg and carries a small yet powerful computer with a GPU. This AI-powered drone can complete rescue missions more efficiently in complicated and disastrous environments by precisely comprehending where the drone should go without needing GPS. The team also designed an all-in-one prop guard and installed a gripper onto the bottom of the drone to hold the aid package securely. “We tried hard to improve our localization system better to resolve issues we had in the previous event,” said Professor Shim. Two PhD candidates, Han-Sob Lee and Bo-Sung Kim played a critical role in developing this drone. After their two-year winning streak, their prize money now totals 2.4 billion KRW, equivalent to the winning prize of the DARPA Challenge. As the winning team, they will collaborate with other champions at the AI track challenge to develop rescue mission technology for a more complex environment. “The importance of AI technology is continuing to grow and the government is providing large amounts of funding for research in this field. We would like to develop very competitive technology that will work in the real world,” Professor Shim added. His group is investigating a wide array of AI technologies applicable to unmanned vehicles including indoor flying drones, self-driving cars, delivery robots, and a tram that circles the campus. < Two PhD candidates, Han-Sob Lee and Bo-Sung Kim make a final touch for the competition. >
-

‘WalkON Suit 4’ Releases Paraplegics from Wheelcha..
- KAIST Athletes in ‘WalkON Suit 4’ Dominated the Cybathlon 2020 Global Edition. - Paraplegic athletes Byeong-Uk Kim and Joohyun Lee from KAIST’s Team Angel Robotics won a gold and a bronze medal respectively at the Cybathlon 2020 Global Edition last week. ‘WalkON Suit 4,’ a wearable robot developed by the Professor Kyoungchul Kong’s team from the Department of Mechanical Engineering topped the standings at the event with double medal success. Kim, the former bronze medallist, clinched his gold medal by finishing all six tasks in 3 minutes and 47 seconds, whereas Lee came in third with a time of 5 minutes and 51 seconds. TWIICE, a Swiss team, lagged 53 seconds behind Kim’s winning time to be the runner-up. < Byeong-Uk Kim (left) and Joohyun Lee (right) > Cybathlon is a global championship, organized by ETH Zurich, which brings together people with physical disabilities to compete using state-of-the-art assistive technologies to perform everyday tasks. The first championship was held in 2016 in Zurich, Switzerland. Due to the COVID-19 pandemic, the second championship was postponed twice and held in a new format in a decentralized setting. A total of 51 teams from 20 countries across the world performed the events in their home bases in different time zones instead of traveling to Zurich. Under the supervision of a referee and timekeeper, all races were filmed and then reviewed by judges. KAIST’s Team Angel Robotics participated in the Powered Exoskeleton Race category, where nine pilots representing five nations including Korea, Switzerland, the US, Russia, and France competed against each other. The team installed their own arena and raced at the KAIST Main Campus in Daejeon according to the framework, tasks, and rules defined by the competition committee. The two paraplegic pilots were each equipped with exoskeletal devices, the WalkON Suit 4, and undertook six tasks related to daily activities. The WalkON Suit 4 recorded the fastest walking speed for a complete paraplegic ever reported. For a continuous walk, it achieved a maximum speed of 40 meters per minute. This is comparable to the average walking pace of a non-disabled person, which is around two to four kilometers per hour. The research team raised the functionality of the robot by adding technology that can observe the user’s level of anxiety and external factors like the state of the walking surface, so it can control itself intelligently. The assistive functions a robot should provide vary greatly with the environment, and the WalkON Suit 4 made it possible to analyze the pace of the user within 30 steps and provide a personally optimized walking pattern, enabling a high walking speed. < WalkON Suit 4 > The six tasks that Kim and Lee had to complete were:1) sitting and standing back up, 2) navigating around obstacles while avoiding collisions, 3) stepping over obstacles on the ground, 4) going up and down stairs, 5) walking across a tilted path, and 6) climbing a steep slope, opening and closing a door, and descending a steep slope. < Overview of the Powered Exoskeleton Race. > Points were given based on the accuracy of each completed task, and the final scores were calculated by adding all of the points that were gained in each attempt, which lasted 10 minutes. Each pilot was given three opportunities and used his/her highest score. Should pilots have the same final score, the pilot who completed the race in the shortest amount of time would win. Kim said in his victory speech that he was so thrilled to see all his and fellow researchers’ years of hard work paying off. “This will be a good opportunity to show how outstanding Korean wearable robot technologies are,” he added. Lee, who participated in the competition for the first time, said, “By showing that I can overcome my physical disabilities with robot technology, I’d like to send out a message of hope to everyone who is tired because of COVID-19”. Professor Kong’s team collaborated in technology development and pilot training with their colleagues from Angel Robotics Co., Ltd., Severance Rehabilitation Hospital, Yeungnam University, Stalks, and the Institute of Rehabilitation Technology. Footage from the competition is available at the Cybathlon’s official website. (END)
-
Researchers Control Multiple Wavelengths of Light ..
KAIST researchers have synthesized a collection of nanoparticles, known as carbon dots, capable of emitting multiple wavelengths of light from a single particle. Additionally, the team discovered that the dispersion of the carbon dots, or the interparticle distance between each dot, influences the properties of the light the carbon dots emit. The discovery will allow researchers to understand how to control these carbon dots and create new, environmentally responsible displays, lighting, and sensing technology. Research into nanoparticles capable of emitting light, such as quantum dots, has been an active area of interest for the last decade and a half. These particles, or phosphors, are nanoparticles made out of various materials that are capable of emitting light at specific wavelengths by leveraging quantum mechanical properties of the materials. This provides new ways to develop lighting and display solutions as well as more precise detection and sensing in instruments. As technology becomes smaller and more sophisticated, the usage of fluorescent nanoparticles has seen a dramatic increase in many applications due to the purity of the colors emitting from the dots as well as their tunability to meet desired optical properties. Carbon dots, a type of fluorescent nanoparticles, have seen an increase in interest from researchers as a candidate to replace non-carbon dots, the construction of which requires heavy metals that are toxic to the environment. Since they are made up of mostly carbon, the low toxicity is an extremely attractive quality when coupled with the tunability of their inherent optical properties. Another striking feature of carbon dots is their capability to emit multiple wavelengths of light from a single nanoparticle. This multi-wavelength emission can be stimulated under a single excitation source, enabling the simple and robust generation of white light from a single particle by emitting multiple wavelengths simultaneously. Carbon dots also exhibit a concentration-dependent photoluminescence. In other words, the distance between individual carbon dots affects the light that the carbon dots subsequently emit under an excitation source. These combined properties make carbon dots a unique source that will result in extremely accurate detection and sensing. This concentration-dependency, however, had not been fully understood. In order to fully utilize the capabilities of carbon dots, the mechanisms that govern the seemingly variable optical properties must first be uncovered. It was previously theorized that the concentration-dependency of carbon dots was due to a hydrogen bonding effect. Now, a KAIST research team, led by Professor Do Hyun Kim of the Department of Chemical and Biomolecular Engineering has posited and demonstrated that the dual-color-emissiveness is instead due to the interparticle distances between each carbon dot. The research was published in the 36th Issue of Physical Chemistry Chemical Physics. First author of the paper, PhD candidate Hyo Jeong Yoo, along with Professor Kim and researcher Byeong Eun Kwak, examined how the relative light intensity of the red and blue colors changed when varying the interparticle distances, or concentration, of the carbon dots. They found that as the concentration was adjusted, the light emitted from the carbon dots would transform. By varying the concentration, the team was able to control the relative intensity of the colors, as well as emit them simultaneously to generate a white light from a single source (See Figure). “The concentration-dependence of the photoluminescence of carbon dots on the change of the emissive origins for different interparticle distances has been overlooked in previous research. With the analysis of the dual-color-emission phenomenon of carbon dots, we believe that this result may provide a new perspective to investigate their photoluminescence mechanism,” Yoo explained. The newly analyzed ability to control the photoluminescence of carbon dots will likely be heavily utilized in the continued development of solid-state lighting applications and sensing. < Figure. Photoluminescence change of dual-color-emissive carbon dots (CDs) depending on their concentration. Blue- and red-emissions show different contributions with different interparticle distances. > Publication: Yoo, H. J., Kwak, B. E., and Kim. D. H. (2020) Interparticle distance as a key factor for controlling the dual-emission properties of carbon dots. Physical Chemistry Chemical Physics, Issue 36, Pages 20227-20237. Available online at https://doi.org/10.1039/d0cp02120b Profile: Do Hyun Kim, Sc.D. Professor dokim@kaist.ac.kr http://procal.kaist.ac.kr/ Process Analysis Laboratory Department of Chemical and Biomolecular Engineering https://www.kaist.ac.kr Korea Advanced Institute of Science and Technology (KAIST) Daejeon, Republic of Korea (END)
-

To Talk or Not to Talk: Smart Speaker Determines O..
A KAIST research team has developed a new context-awareness technology that enables AI assistants to determine when to talk to their users based on user circumstances. This technology can contribute to developing advanced AI assistants that can offer pre-emptive services such as reminding users to take medication on time or modifying schedules based on the actual progress of planned tasks. Unlike conventional AI assistants that used to act passively upon users’ commands, today’s AI assistants are evolving to provide more proactive services through self-reasoning of user circumstances. This opens up new opportunities for AI assistants to better support users in their daily lives. However, if AI assistants do not talk at the right time, they could rather interrupt their users instead of helping them. The right time for talking is more difficult for AI assistants to determine than it appears. This is because the context can differ depending on the state of the user or the surrounding environment. A group of researchers led by Professor Uichin Lee from the KAIST School of Computing identified key contextual factors in user circumstances that determine when the AI assistant should start, stop, or resume engaging in voice services in smart home environments. Their findings were published in the Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies (IMWUT) in September. The group conducted this study in collaboration with Professor Jae-Gil Lee’s group in the KAIST School of Computing, Professor Sangsu Lee’s group in the KAIST Department of Industrial Design, and Professor Auk Kim’s group at Kangwon National University. After developing smart speakers equipped with AI assistant function for experimental use, the researchers installed them in the rooms of 40 students who live in double-occupancy campus dormitories and collected a total of 3,500 in-situ user response data records over a period of a week. The smart speakers repeatedly asked the students a question, “Is now a good time to talk?” at random intervals or whenever a student’s movement was detected. Students answered with either “yes” or “no” and then explained why, describing what they had been doing before being questioned by the smart speakers. Data analysis revealed that 47% of user responses were “no” indicating they did not want to be interrupted. The research team then created 19 home activity categories to cross-analyze the key contextual factors that determine opportune moments for AI assistants to talk, and classified these factors into ‘personal,’ ‘movement,’ and ‘social’ factors respectively. Personal factors, for instance, include: 1. the degree of concentration on or engagement in activities, 2. the degree urgency and busyness, 3. the state of user’s mental or physical condition, and 4. the state of being able to talk or listen while multitasking. While users were busy concentrating on studying, tired, or drying hair, they found it difficult to engage in conversational interactions with the smart speakers. Some representative movement factors include departure, entrance, and physical activity transitions. Interestingly, in movement scenarios, the team found that the communication range was an important factor. Departure is an outbound movement from the smart speaker, and entrance is an inbound movement. Users were much more available during inbound movement scenarios as opposed to outbound movement scenarios. In general, smart speakers are located in a shared place at home, such as a living room, where multiple family members gather at the same time. In Professor Lee’s group’s experiment, almost half of the in-situ user responses were collected when both roommates were present. The group found social presence also influenced interruptibility. Roommates often wanted to minimize possible interpersonal conflicts, such as disturbing their roommates' sleep or work. Narae Cha, the lead author of this study, explained, “By considering personal, movement, and social factors, we can envision a smart speaker that can intelligently manage the timing of conversations with users.” She believes that this work lays the foundation for the future of AI assistants, adding, “Multi-modal sensory data can be used for context sensing, and this context information will help smart speakers proactively determine when it is a good time to start, stop, or resume conversations with their users.” This work was supported by the National Research Foundation (NRF) of Korea. < Image 1. In-situ experience sampling of user availability for conversations with AI assistants > < Image 2. Key Contextual Factors that Determine Optimal Timing for AI Assistants to Talk > Publication: Cha, N, et al. (2020) “Hello There! Is Now a Good Time to Talk?”: Opportune Moments for Proactive Interactions with Smart Speakers. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies (IMWUT), Vol. 4, No. 3, Article No. 74, pp. 1-28. Available online at https://doi.org/10.1145/3411810 Link to Introductory Video: https://youtu.be/AA8CTi2hEf0 Profile: Uichin Lee Associate Professor uclee@kaist.ac.kr http://ic.kaist.ac.kr Interactive Computing Lab. School of Computing https://www.kaist.ac.kr Korea Advanced Institute of Science and Technology (KAIST) Daejeon, Republic of Korea (END)
![]()
291 Daehak-ro, Yuseong-gu, Daejeon, Korea 34141
KAIST College of Engineering
T.+82-42-350-2114
F.+82-42-350-2210 (2220)
ⓒ KAIST College of Engineering. All rights reserved.